Toggle navigation
Introduction
Overview
Welcome Message
MAE Milestones
Faculty
Full-time Faculty
Courtesy Appointment
Lab Instructor
Administrative Staff
Education
Undergraduate
Postgraduate
Teaching Center
Education & Admission Information
Research
Research Areas
Research Platform
Research Project
Research Dynamics
Academic Conference
News
News
Academic Lecture
Announcement
Join Us
Teaching & Research Positions
Research Assistant Positions
Postdoctoral Positions
中文
/
EN
News
News
Academic Lecture
Announcement
Notice
Admissions
Home
>
News
>
Academic Lecture
News
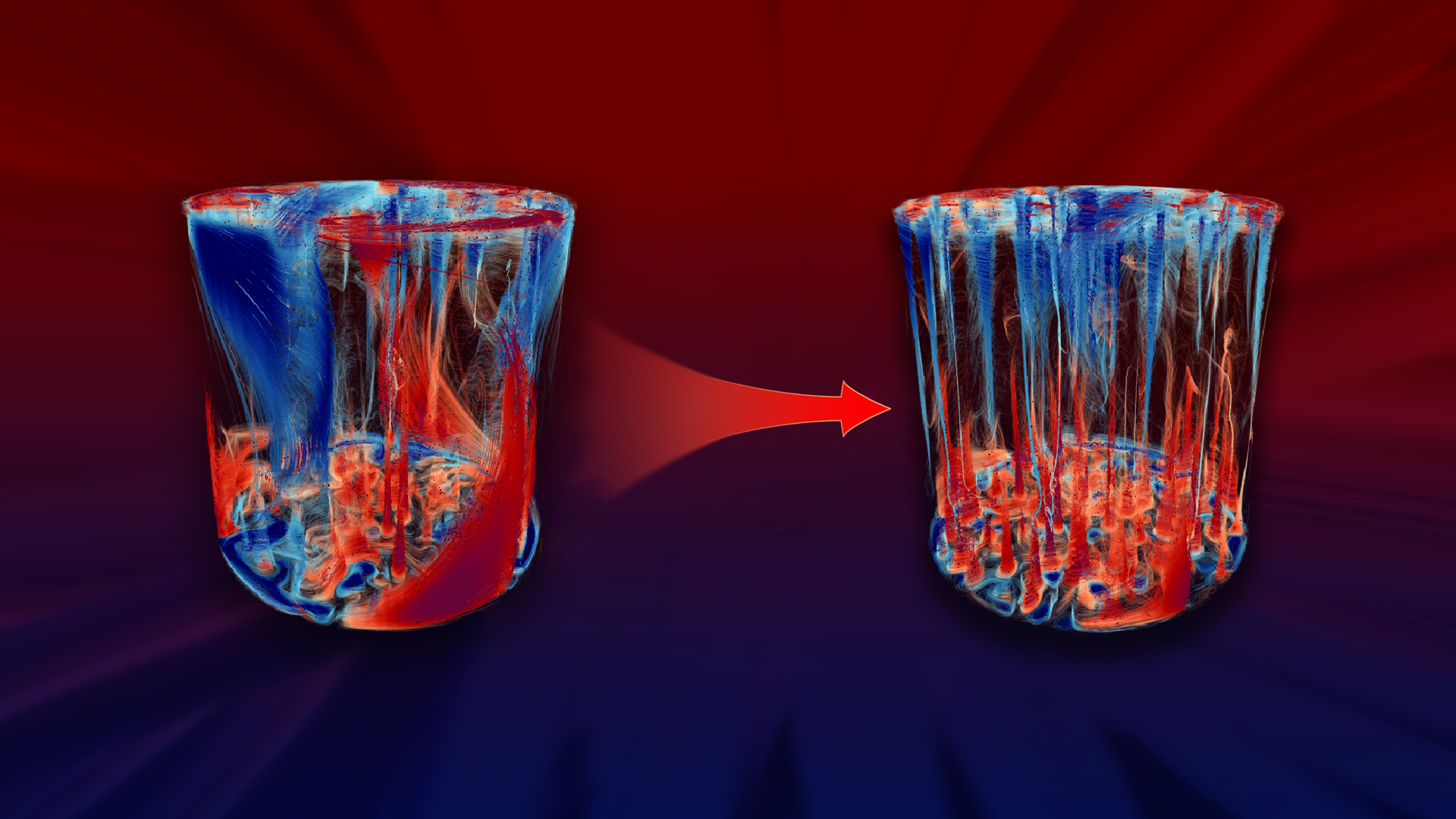
Researchers reveal properties in heat transfer and flow morphology of boundary flow in rotating thermal convection
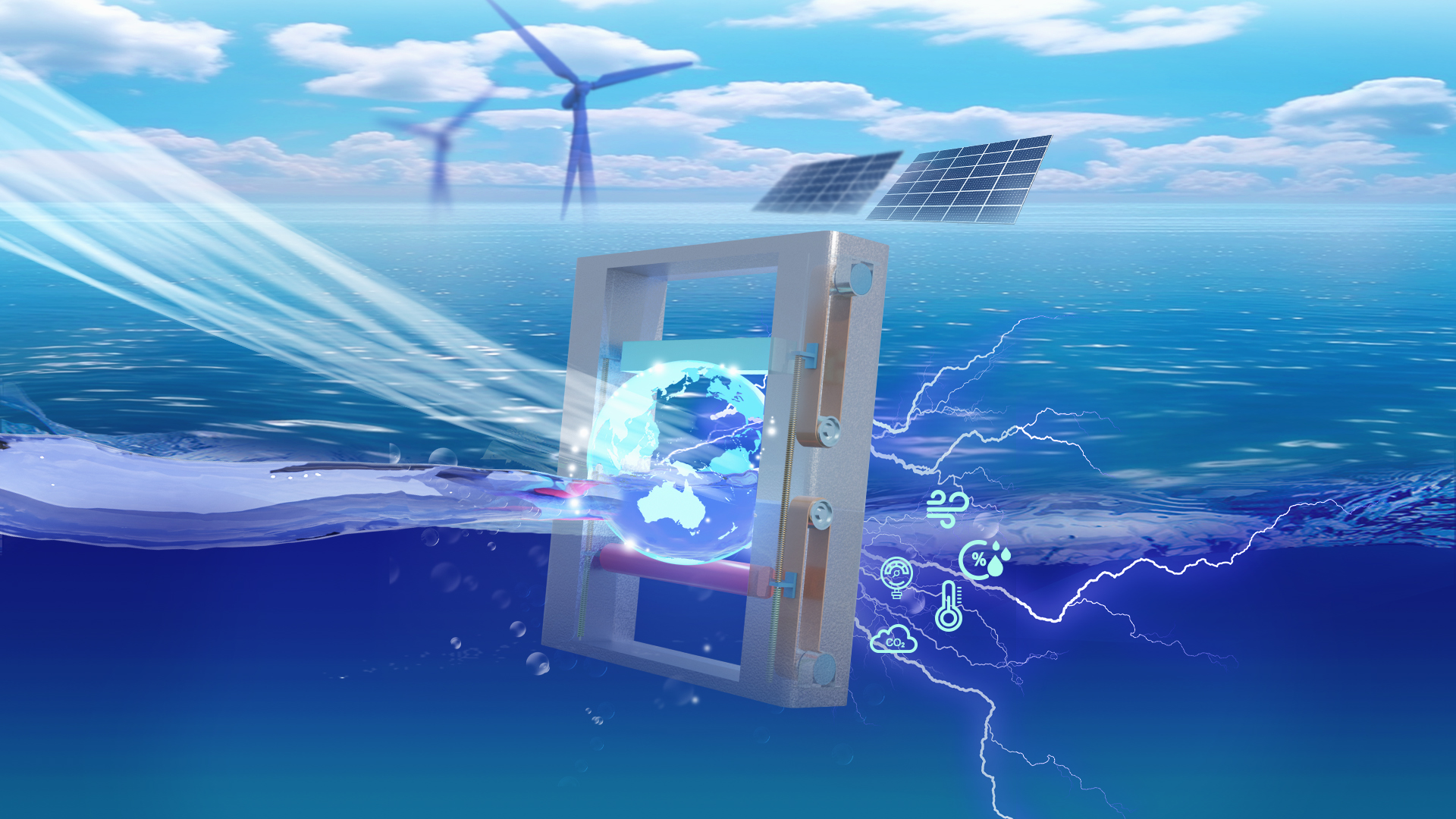
Researchers propose novel schemes for complementary exploitation of tidal current and offshore wind energies
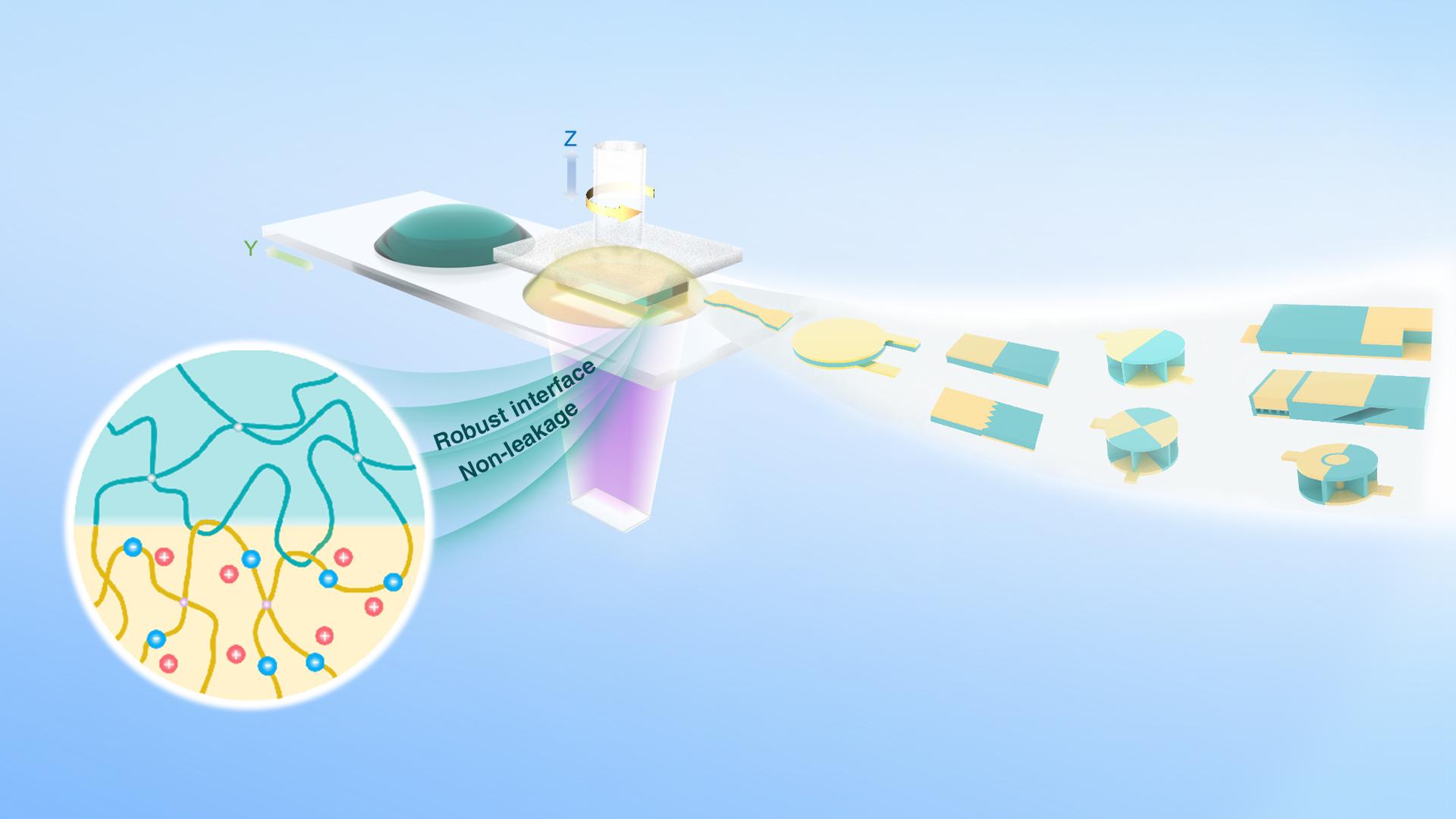
Researchers make advances in ionotronic sensors with multi-mode sensing capabilities
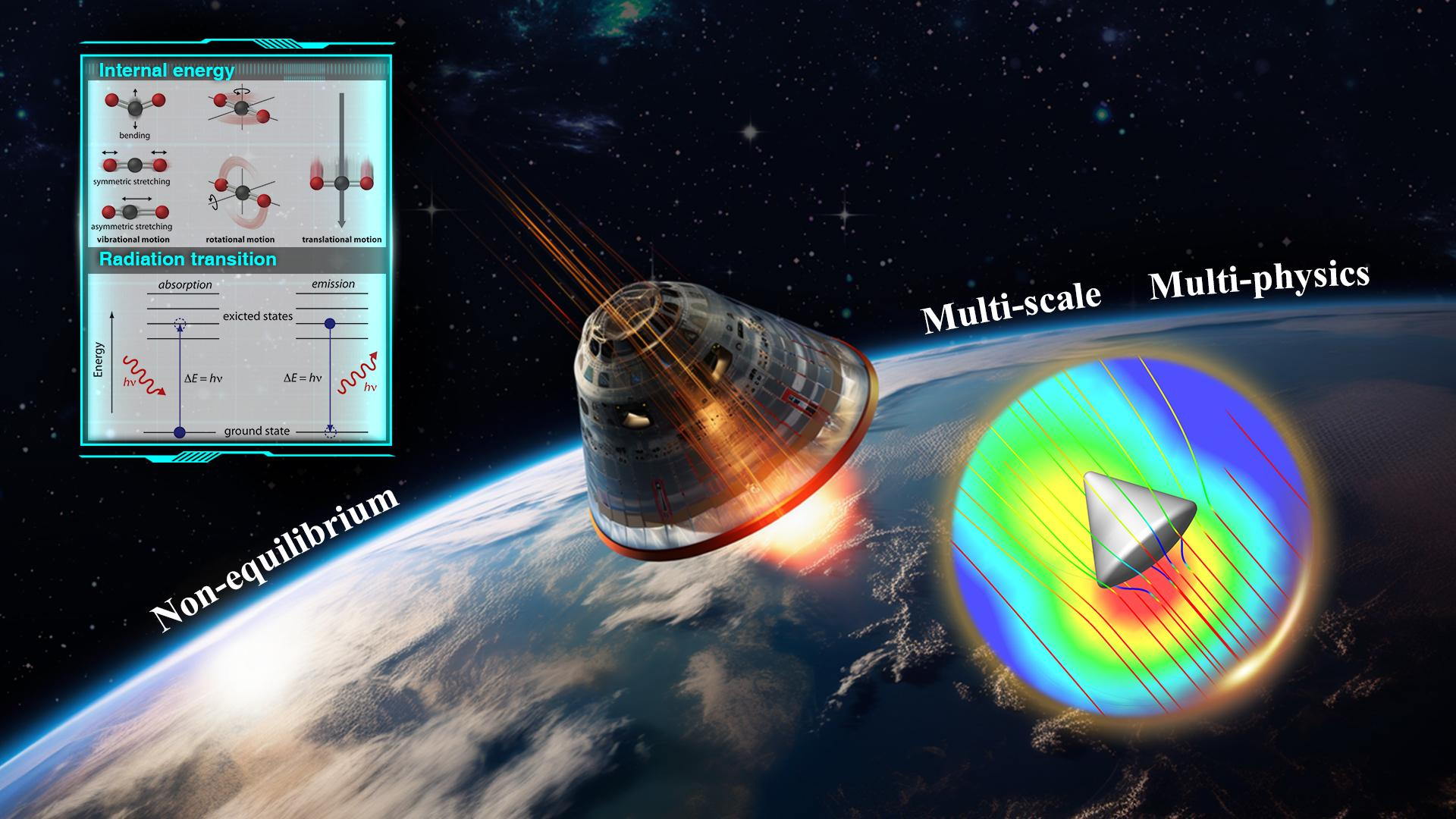
Researchers propose kinetic models for high-temperature rarefied gas flows with radiation
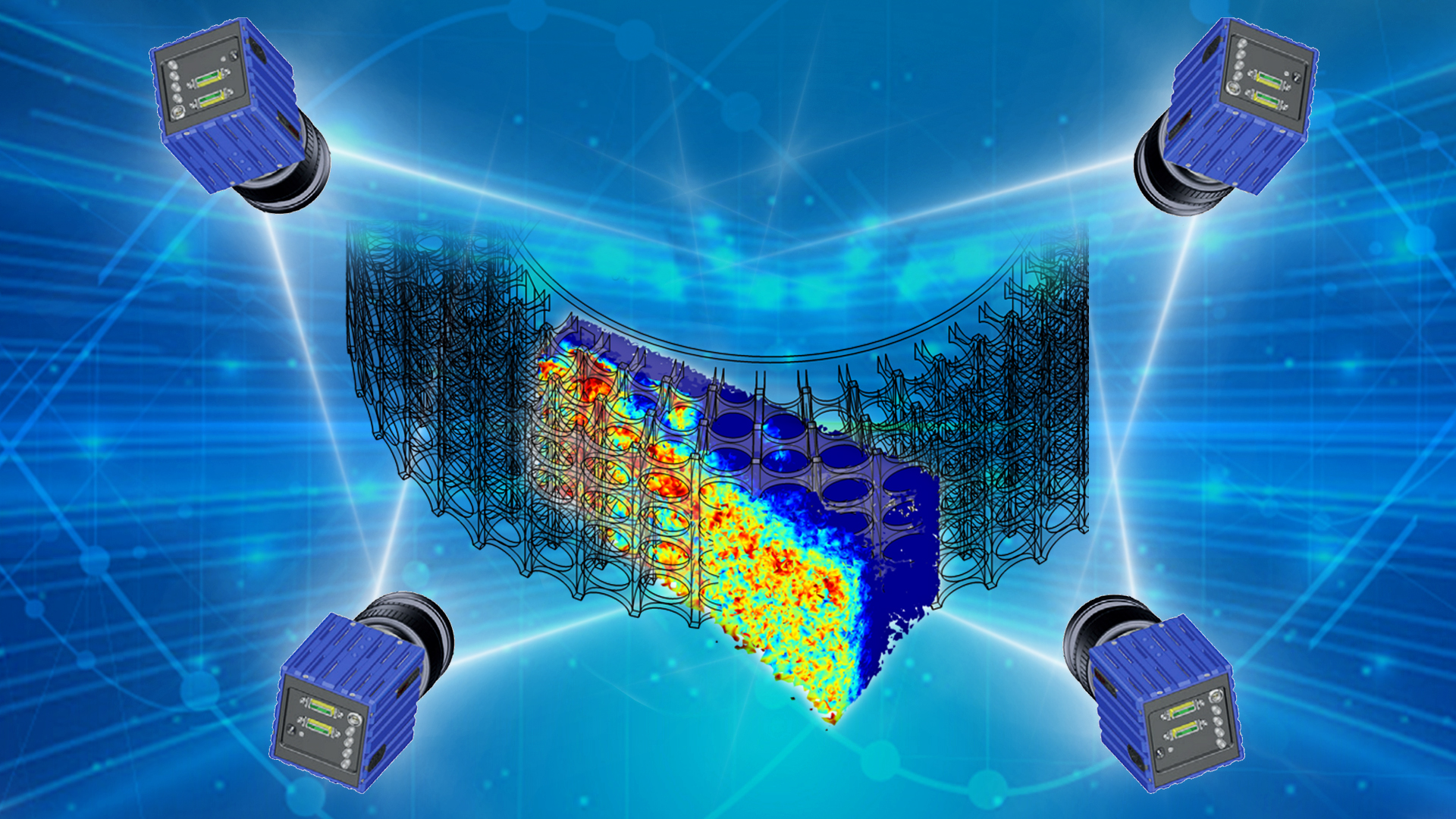
Researchers reveal internal flow mechanisms of porous media
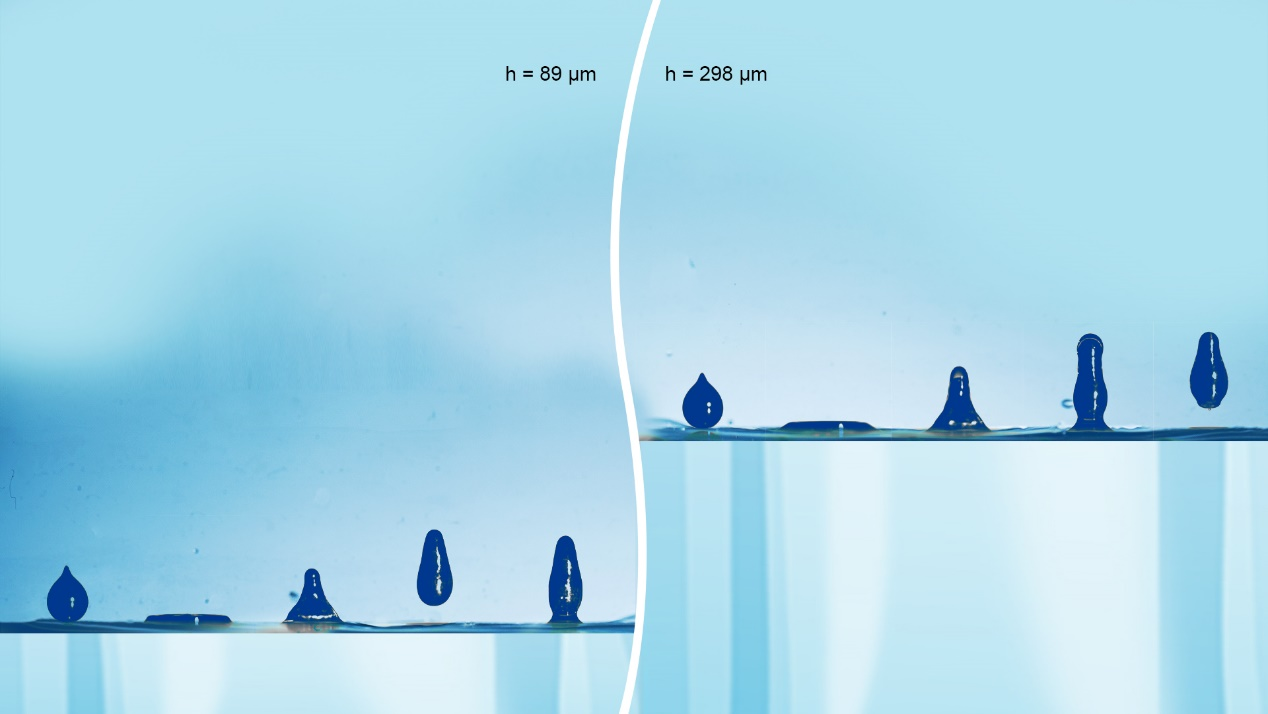
Researchers discover anomalous bouncing phenomenon of liquid metal droplets
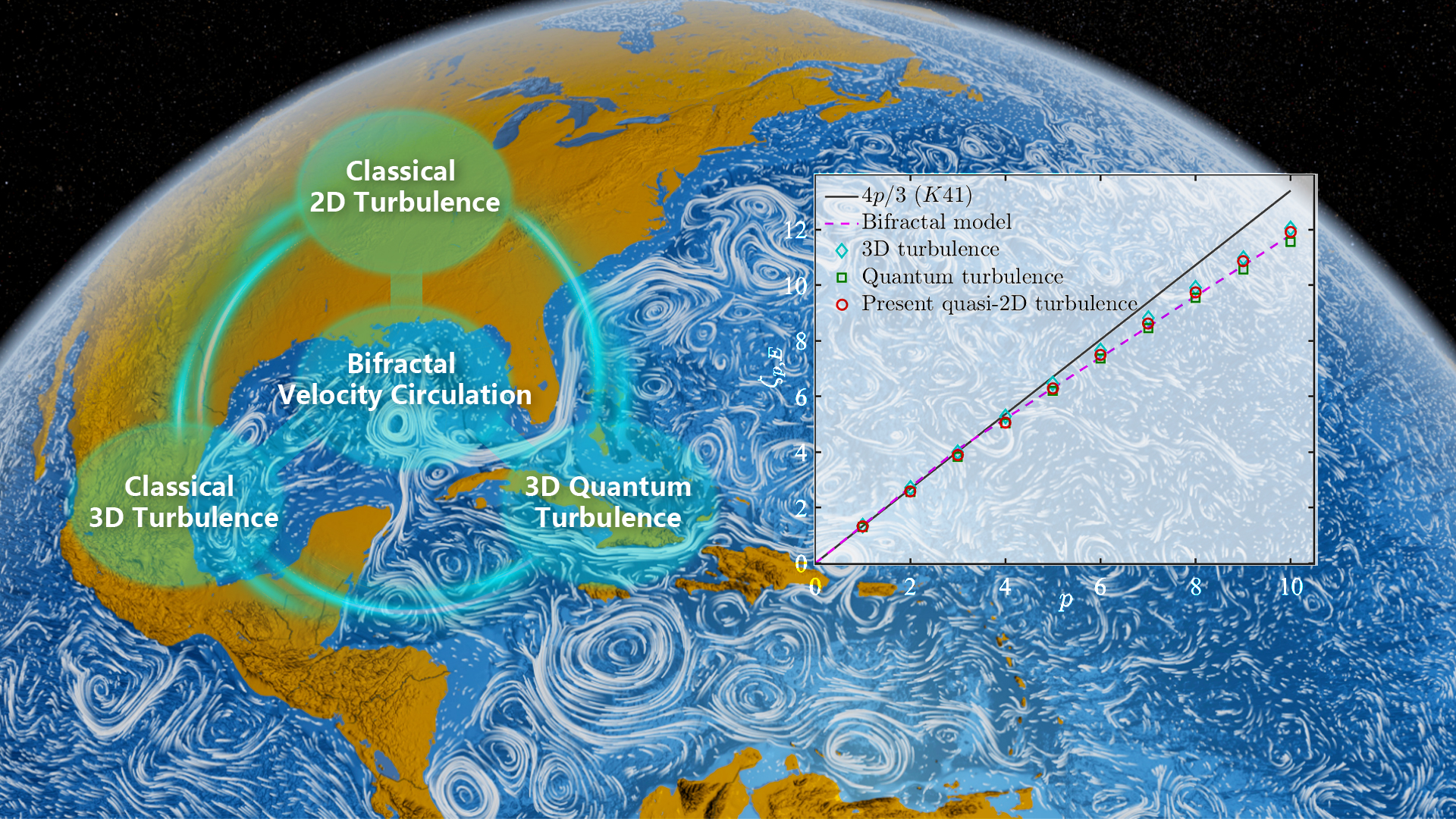
Researchers experimentally reveal bifractal circulation in turbulence
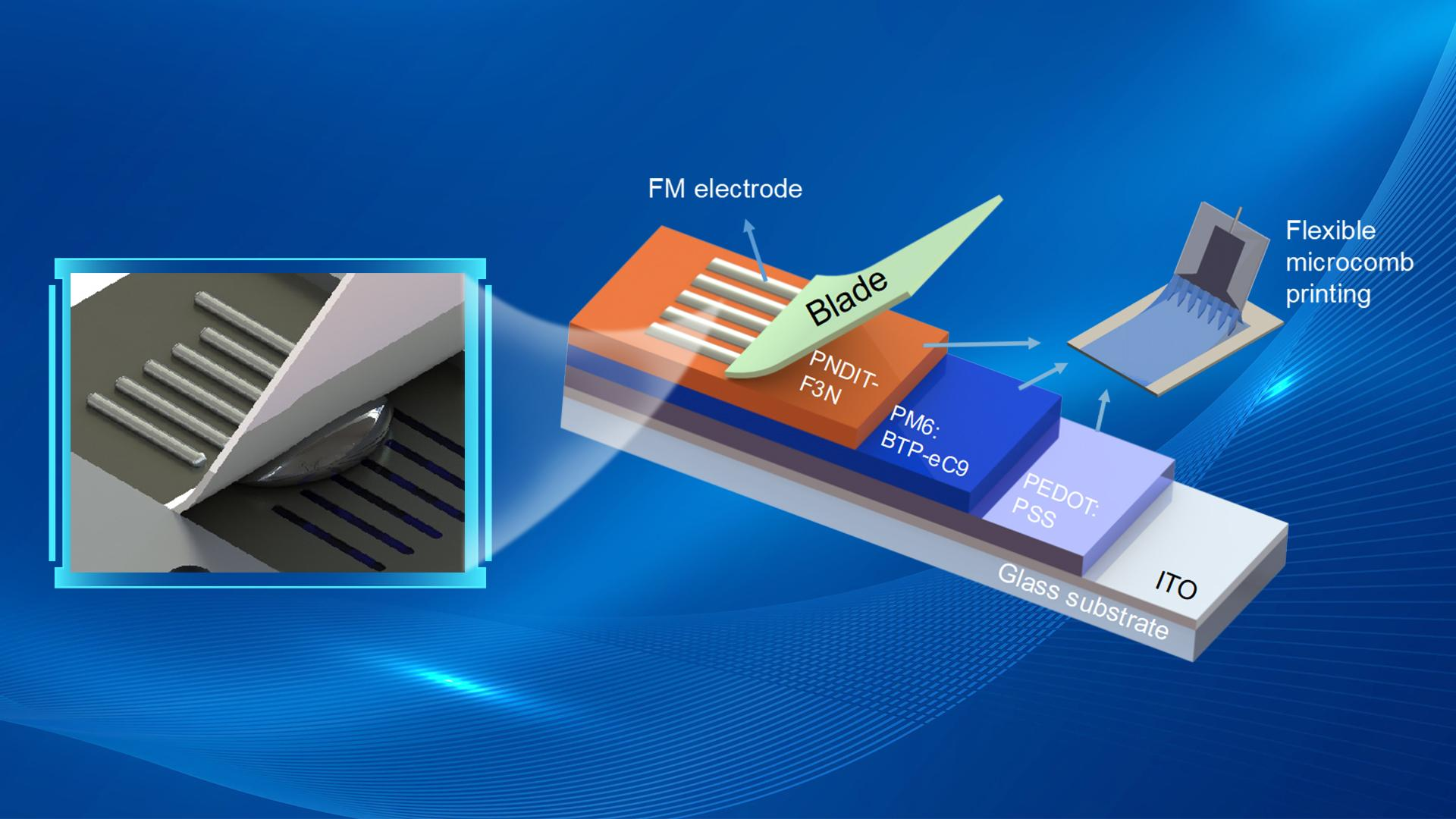
Researchers fabricate high efficiency all-printed organic photovoltaics based on top electrodes of alloy by blade-coating
Researchers make advances in printing electrodes for organic solar cells
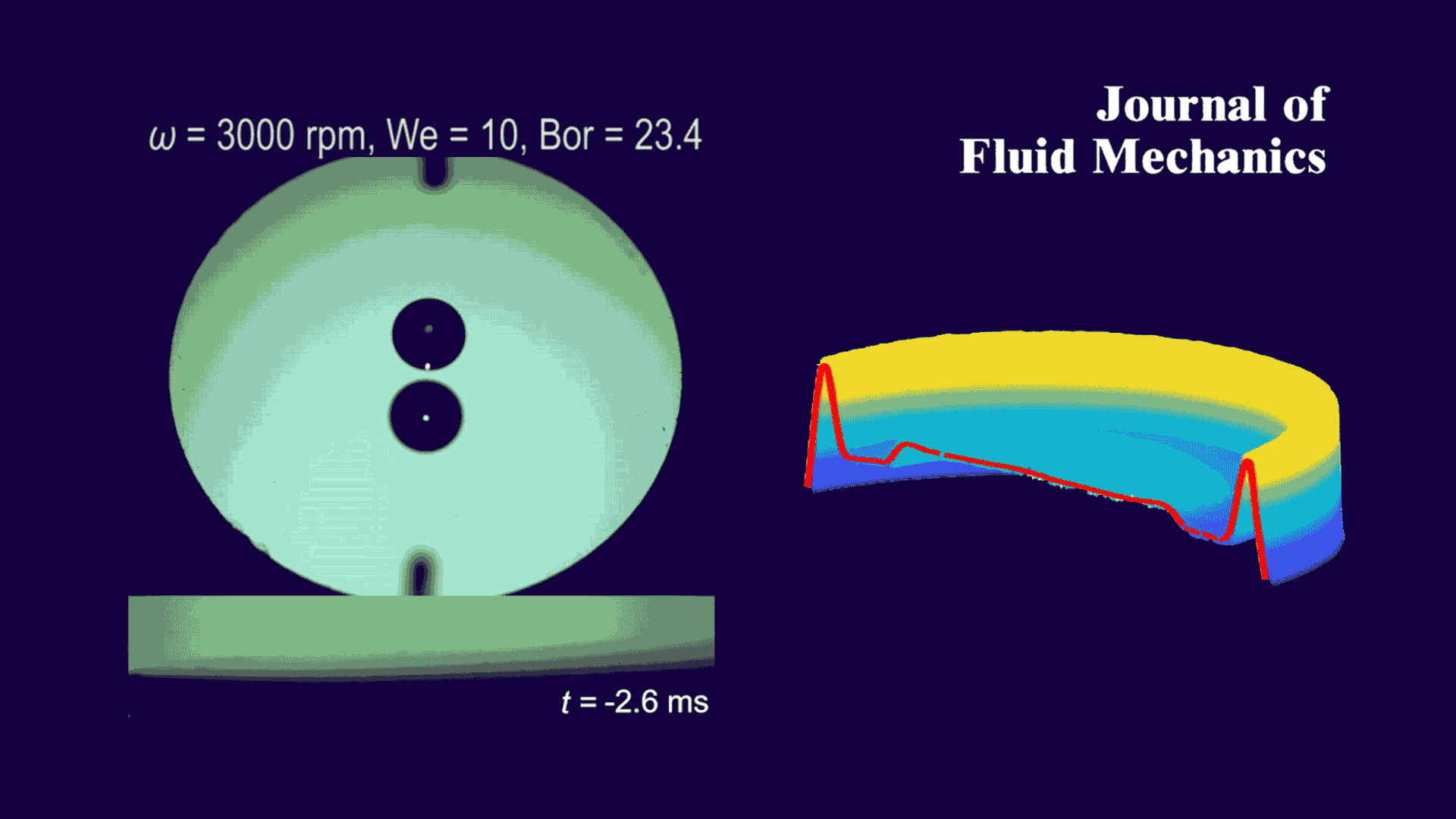
Researchers analyze characteristic parameters of droplet spin coating process
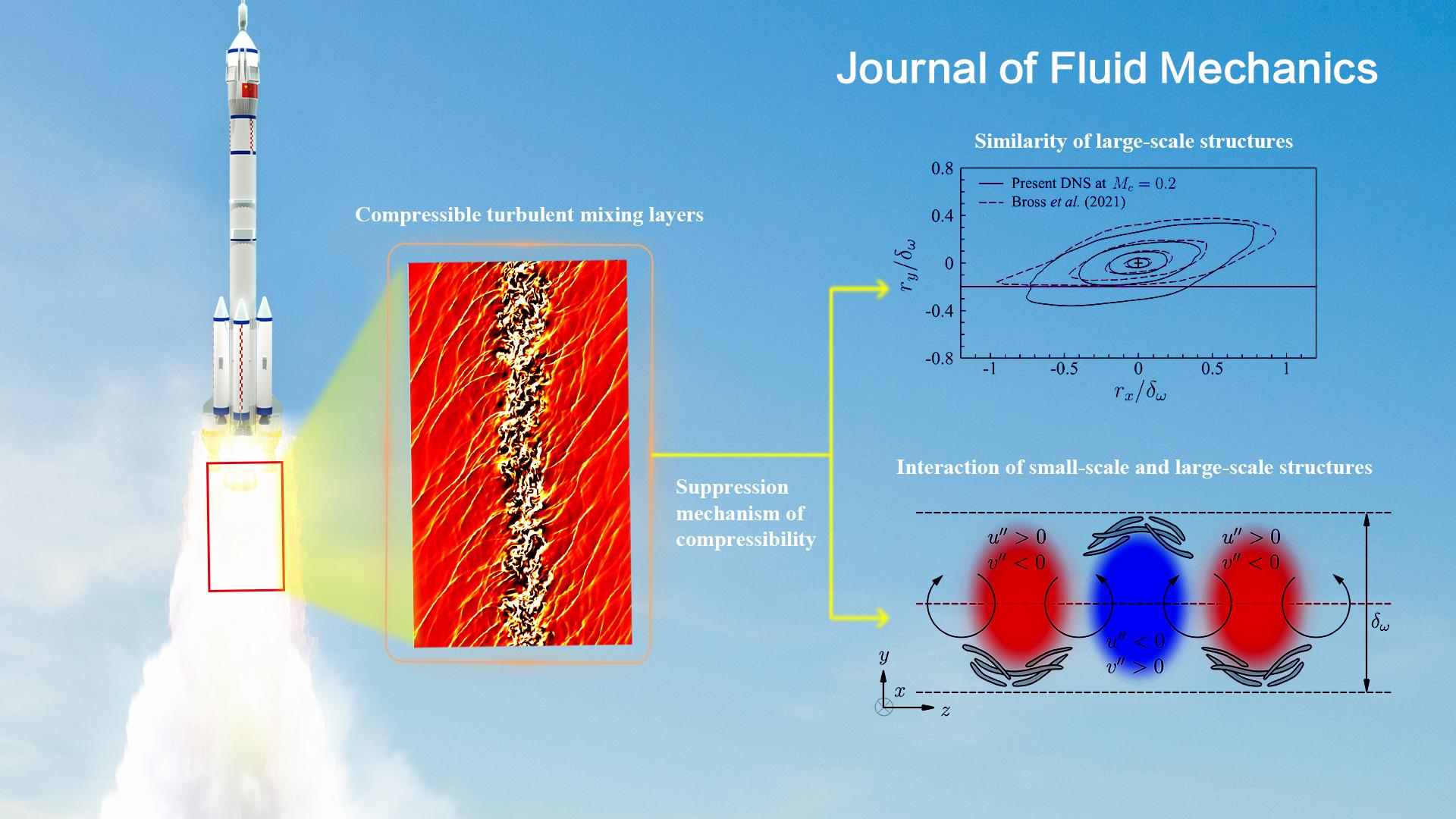
Researchers make advances in suppression mechanism and coherent structures of compressible turbulent mixing layers
Researchers propose first hyperelastic adhesive for heterogeneous polymer network
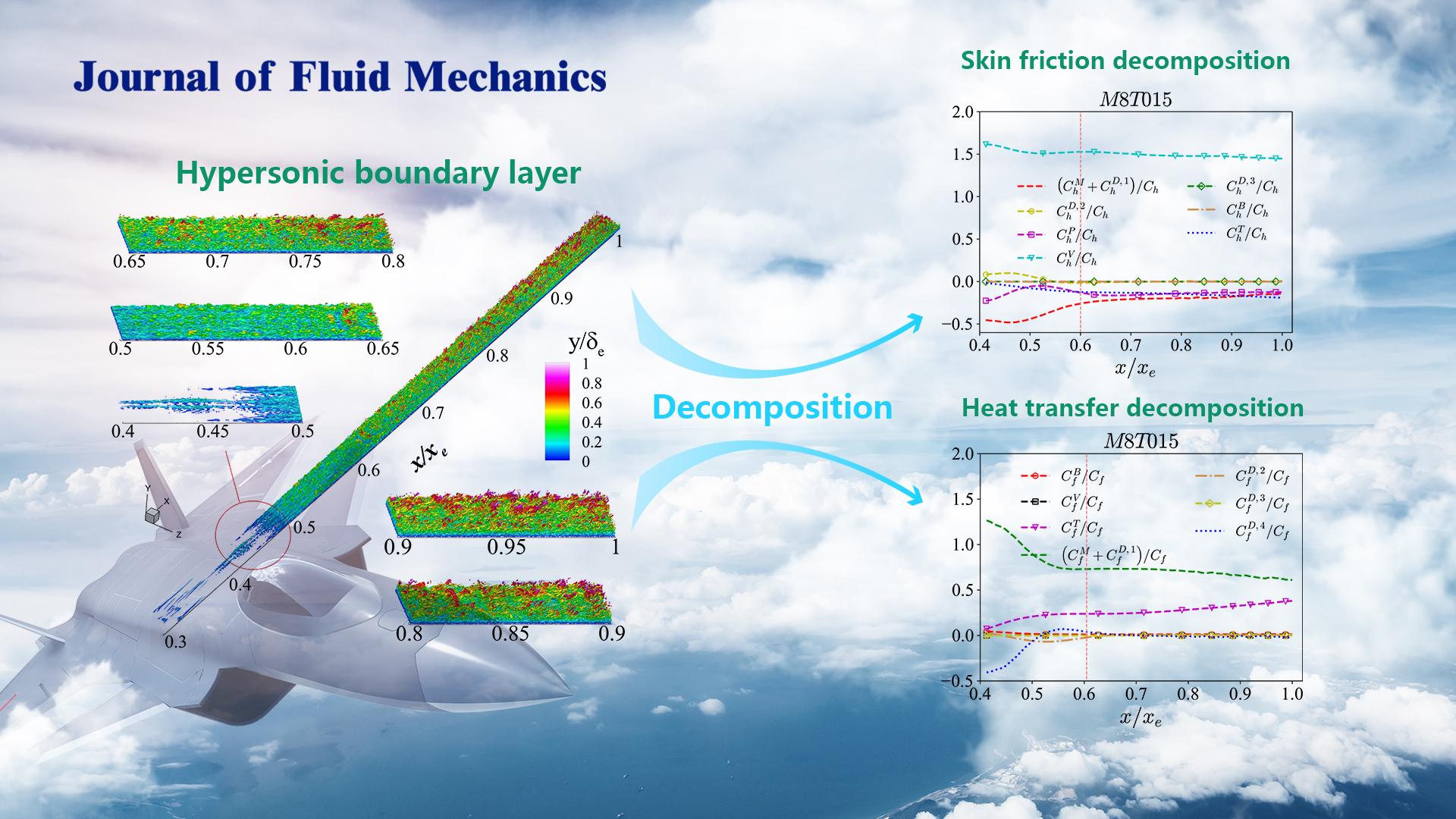
Exploring decompositions of wall skin friction and heat transfer in hypersonic transitional and turbulent boundary layers
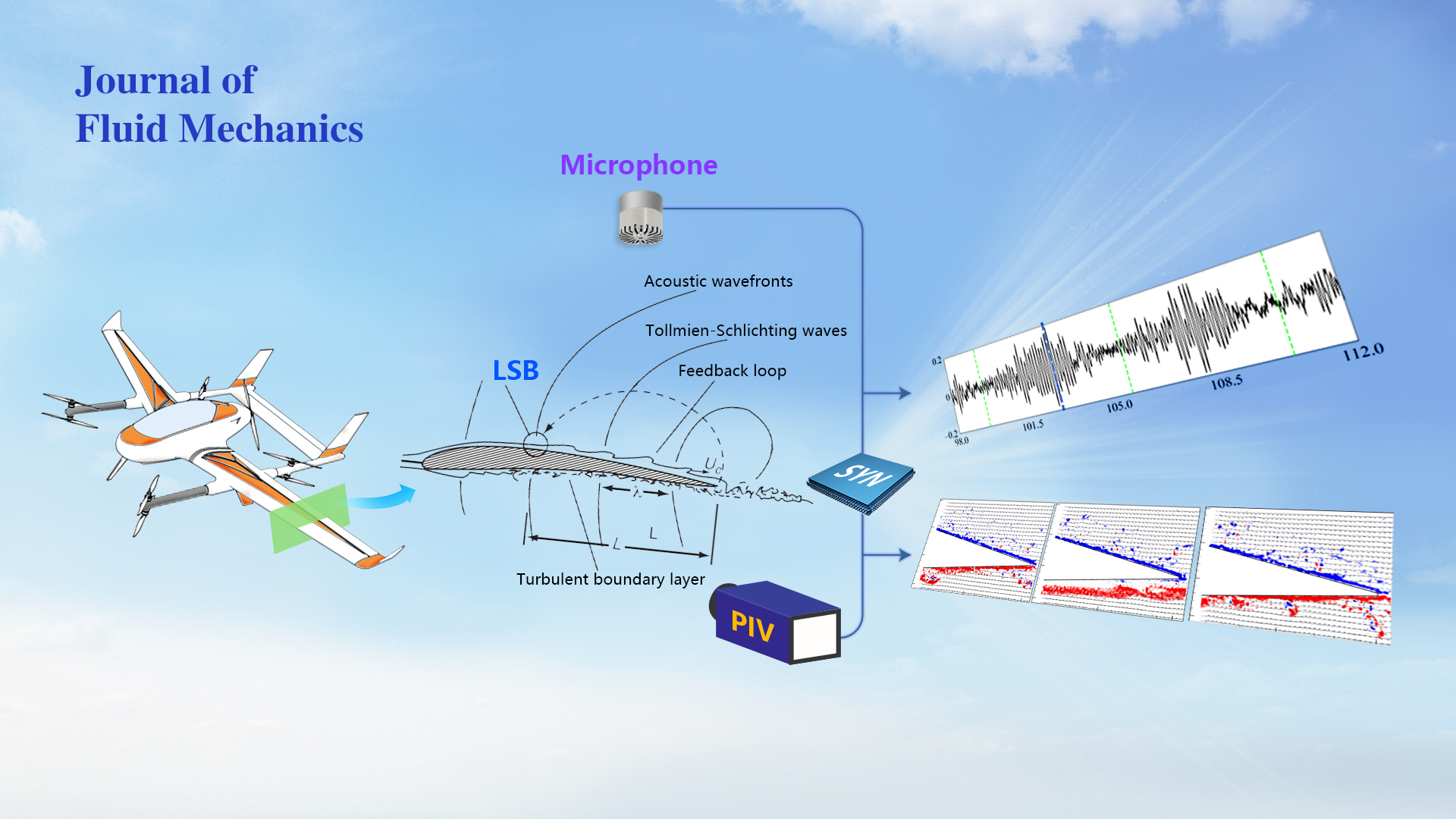
Researchers make advances in field of aerofoil tonal noise mechanism
Researchers make progress in organic photovoltaics for solar tracking
Breaking liquid jet into uniform droplets using laser beam
SUSTech researchers collaborate with Tongji University to publish important research on inverse centrifugal vortex motion
Pollen inspired rule behind motion of turbulent vortices
The 11th National Conference on Fluid Mechanics held in SUSTech
MAE Associate Professor elected as Fellow of RAeS
Thematic page
Party building culture
The Party Branch of the Department of Mechanics and Aviation held a campus-oriented party history education activity "Remembering the Party History, Do Not Forget the Original Heart"
2019-10-12
Student style
The Department of Mechanics and Aerospace Engineering organized undergraduates to the aviation development base to exchange learning activities successfully concluded
2019-10-12
Teacher style
The first Symposium of Engineering Computing Software Development Alliance was successfully held in Southern University of Science and Technology
2019-10-12
动力学引导的连续型机器人感知与控制研究
Time:2023-11-30
View:
0
Prev:
Physics-informed machine learning (PINN): a novel computer modelling framework for mechanics
Next:
Unified perspectives on reduced-order modelling of nonlinear structures